






Step Motorlar
Ürettiğimiz elektrik enerjisini mekanik enerjiye çevirmemizi elektrik motorları sağlar. Dolayısıyla mekanik harekete ihtiyaç duyduğumuz her yerde onlar vardır. Bu ihtiyaç duydugumuz mekanik harekette aranan özellik 'hassasiyet' ise akla gelen ilk elektrik motor çeşidi de step motorlardır.

Günümüzde üretilen sistemlerin hata payının oldukça düşük olması istenilmektedir. Bunun sebebi kullanıcıların birden fazla sistemi aynı anda çalıştırmak zorunda olması ve bu sistemlerin enterkonnekte olarak inşa edilmesidir. Bu da herhangi bir sistemdeki hatanın tüm sistemin çalışmasını engellemesi anlamına gelebilir. Sistem hatalarını önlemenin en iyi yolu sistemde kullanılan elemanların hassasiyetini arttırmaktır. Küçük güçlerde ve tekrarlanan hareketlerde hassasiyetin en ekonomik yolu step motor kullanmaktır.
Step motorlar, encoderlara (bağlı oldugu şaftın hareketine karşılık dijital bir sinyal üreten elektromekanik cihaz) ihtiyaç duymazlar. Ayrıca sürücüleri oldukça basit ve ucuzdur. Hassasiyetlerini mikrostep tekniği ile 0,07 dereceye kadar düşürmek mümkündür. Step motorlar tüm bu avantajlarını basit bir motor yapısı ile sağlarlar.
.jpg)
Step motor yapısı ve çalışma şekli:
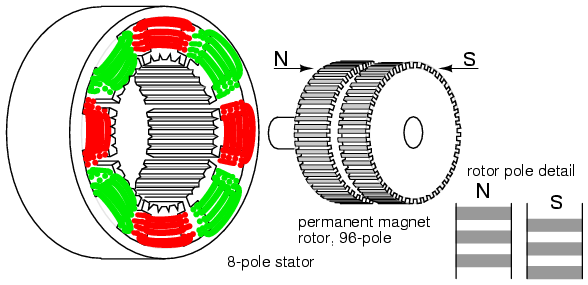
Step motorlar fırçasız senkron motor olarak sınıflandırılırlar. Step adı bir devrini adım adım hareket ederek tamamladığı için verilmiştir. Her elektrik motoru gibi stator ve rotordan oluşur ancak gerilim uygulandığında diğer motorlar gibi serbest dönmediklerinden mekaniksel farklılıkları vardır.
Yapısal olarak rotorunda bir adet merkez dişli ve statorunda istenen adım derecesine göre sayısı değişen dişli kutuplar bulunur. Sürücü devresi ile ilk kutupa enerji verildiğinde merkez dişli ile kutup dişlisi arasında elektro-mıknatıslanma gerçekleşir. Bu sayede merkez dişli, kutup dişlisinin konumuna göre önceden belirlenmiş bir açı ile hareket ederek kendini bu kutbun dişlisine hizalar. Bu sırada birinci kutbun enerjisi kesilip ikinci kutba enerji verildiğinde merkez dişli bu sefer ikinci kutup dişlisine aynı açı ile kendisini hizalamak için hareket edecektir. Merkez dişlinin enerji verilen kutba kendini hizalamak için yaptığı yer değiştirmelerin her birine adım denir . Böylece merkez dişli 2 adım kadar bir dönüş gerçekleştirmiş olur. Buradan da anlaşılacağı gibi step motor çalışması kutuplarda ki enerjilendirmeye bağlıdır. İstenen çalışma düzeni sürücü devresi sayesinde kutuplara darbe sinyalleri şeklinde iletilir. Bu sinyallerin frekansının değiştirilmesi ile motor hızı dolayısıyla tork kontrol edilebilir. Uygulanan sinyallerin sırası değiştirilerek de motor yönü saat yönünde veya saat yönünün tersinde ayarlanabilir. Ancak step motorların adım açısı üretiminden sonra değiştirilemez.
Step Motor Çeşitleri
Temel olarak üç çeşit step motor vardır diyebiliriz, ancak kullanım alanının giderek yaygınlaşması sebebiyle fazla kullanılmayan başka çeşitleride oluşturulmuştur.
1. Sabit mıknatıslı step motorlar
Sabit mıknatıslı step motorların temel özelliği; stator içindeki döner kısmın iki kutuplu sabit mıknatıslı rotoru olmasıdır. Sabit mıknatıslı rotorlarda diş bulunmaz. Daha çok rotor disk veya yuvarlak şekildedir. Bu tip step motorların adım açısı genellikle 30 ila 90 derece arasında değişmektedir. Adım açılarının bu kadar büyük olma sebebi ise az sayıda kutup içerecek şekilde imal edilmeleridir. Ayrıca sabit mıknatıslı step motorların momenti diğer step motorlara göre daha düşüktür.

2. Değişken relüktanslı step motorlar
Değişken relüktanslı step motorların rotoru, artık mıknatıslık özelliği olmayan dişli yapıda yumuşak demirden oluşur. Statoru en az 4 dişli yapıda kutuplardan oluşur. Ancak bu yapıdaki step motorlarda rotor ile stator dişlilerinin sayısı eşit değildir.

Şekilde rotoru 4 ve statoru 6 dişli olan bir değişken relüktanslı step motor yapısı görülmektedir. Uyarılmış II-II’ stator kutuplarına karşılık 2 rotor kutbu hizalanmıştır. Kalan 2 rotor kutbu ise diğer kutupların tam ortasında hizalanmış ve diğer uyarılmayı karşılamak için hazır beklemektedir. Bu durum da rotor hareketi daha seri olacak ve rotor momenti artacaktır.
Değişken relüktanslı step motorlardan asıl beklenti hızdır. Bu sebeple rotoru eylemsizlik momentinin küçük olması için hafif ve küçüktür. Stator ile rotor hava boşluğu oldukça küçük tutulur. Bunun tork ve doğru konumlamaya da büyük katkısı vardır. Bu imal özellikleri ile değişken relüktanslı step motorlar, sabit mıknatıslı step motorlara göre başlama, durma ve dönme adımları daha hızlıdır.

3. Hybrid step motorlar
Hybrid step motorlar, değişken relüktanslı step motorlar ile sabit mıknatıslı step motorların çalışma sistemlerinin birleştirilerek oluşturulmuş step motorlardır. Stator kısmı genellikle 8 kutuptan oluşur. Ayrıca stator kutuplarında sargılarda bulunur. Bu sargılar rotorun istenen konuma gelebilmesi için mıknatıs akısını düzenlemek için kullanılır. Rotor, bir mil üzerine yerleştirilmiş birbirinin aynısı olan iki adet dişli göbek ve bu göbeklerin arasına yerleştirilmiş sabit mıknatısdan oluşur. Rotorunda sabit mıknatıs bulunduğundan bu tip motorlarda kalıntı torku her daim mevcuttur. Hybrid step motorlar en yaygın kullanılan step motor çeşididir.
Step Motorun Avantajları:
- Dijital giriş işaretlerini cevap verirler, bu yüzden bilgisayar veya mikroişlemcilerle kontrol edilebilirler.
- Oldukça düşük hassasiyetlerde bile yüksek performans sağlarlar.
- Sinyallarin frekansına bağlı olarak çok geniş bir hız aralığında çalıştırılabilirler.
- Geri beslemeye ihtiyaçları yoktur.
- Oldukça dayanıklılardır, aşırı yüklerde hasar görmezler.
- Bakım gerektirmezler.
Step motorların dezavantajları:
- Adım açıları sabittir, sonradan değiştirilemez.
- Verimleri sürücülere göre düşük olabilir.
- Bazı yüklerde konum hatası yapabilirler.
- Çıkış momenti ve gücü sınırlıdır.
Step motorlar ilk defa 1935 yılında üretilmelerine rağmen yaygın olarak kullanımı 1970 yılına kadar geçikmiştir. Bunun sebebi bu yıla kadar üretilen sürücü devrelerinin yetersiz olmasıdır. Giderek gelişen mikroişlemci ve elektronik teknolojisi sayesinde step motorlar günümüzde çok çeşitli alanların ihtiyaçını karşılamaktadır. Ancak bunların arasında en önemli alan robotiktir. Robot teknolojisindeki hassasiyete verilen önem sebebiyle step motorlar robot üretiminde büyük pay sahibidir. Gelecekte step motorlardaki gelişimler, robot teknolojisinin ucuzlamasına ve kullanımının yaygınlaşmasına etki edecek en büyük faktörlerden biri olabilir.

ORÇUN ŞEN
Yıldız Teknik Üniversitesi

 Orçun ŞEN
Orçun ŞEN
-
 Dünyanın En Görkemli 10 Güneş Tarlası
Dünyanın En Görkemli 10 Güneş Tarlası
-
 Dünyanın En Büyük 10 Makinesi
Dünyanın En Büyük 10 Makinesi
-
 2020’nin En İyi 10 Kişisel Robotu
2020’nin En İyi 10 Kişisel Robotu
-
 Programlamaya Erken Yaşta Başlayan 7 Ünlü Bilgisayar Programcısı
Programlamaya Erken Yaşta Başlayan 7 Ünlü Bilgisayar Programcısı
-
 Üretimin Geleceğinde Etkili Olacak 10 Beceri
Üretimin Geleceğinde Etkili Olacak 10 Beceri
-
 Olağan Üstü Tasarıma Sahip 5 Köprü
Olağan Üstü Tasarıma Sahip 5 Köprü
-
 Dünyanın En İyi Bilim ve Teknoloji Müzeleri
Dünyanın En İyi Bilim ve Teknoloji Müzeleri
-
 En İyi 5 Tıbbi Robot
En İyi 5 Tıbbi Robot
-
 Dünyanın En Zengin 10 Mühendisi
Dünyanın En Zengin 10 Mühendisi
-
 Üretim için 6 Fabrikasyon İşlemi
Üretim için 6 Fabrikasyon İşlemi
-
 ABB Sürücü Ailesi & Yeni ACS480 Sürücüler | Webinar
ABB Sürücü Ailesi & Yeni ACS480 Sürücüler | Webinar
-
 Geleceğin Güç Altyapısı Galaxy VXL ile Tanışın | Schneider Electric
Geleceğin Güç Altyapısı Galaxy VXL ile Tanışın | Schneider Electric
-
 Senplus Pano Sistem Tanıtımı I Webinar
Senplus Pano Sistem Tanıtımı I Webinar
-
 Nasıl Dönüşür | Rüzgar Enerjisi
Nasıl Dönüşür | Rüzgar Enerjisi
-
 Nasıl Dönüşür | Hava Kalitesi İndeksi
Nasıl Dönüşür | Hava Kalitesi İndeksi
-
 Nasıl Dönüşür | Sorumlu Üretim ve Tüketim
Nasıl Dönüşür | Sorumlu Üretim ve Tüketim
-
 Webinar I Sigma Elektrik'ten Yeni ve Yenilikçi Ürün Portföyü Tanıtım Webinarı
Webinar I Sigma Elektrik'ten Yeni ve Yenilikçi Ürün Portföyü Tanıtım Webinarı
-
 Nasıl Dönüşür | Eko Etiket
Nasıl Dönüşür | Eko Etiket
-
 Nasıl Dönüşür | Uzaktan Erişim
Nasıl Dönüşür | Uzaktan Erişim
-
 Nasıl Dönüşür | Paris Anlaşması
Nasıl Dönüşür | Paris Anlaşması


